Описание слайда:
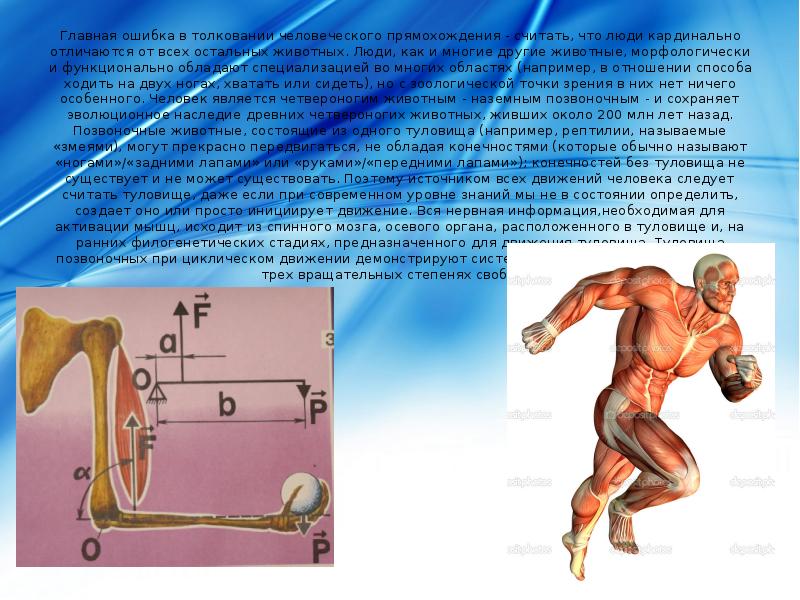
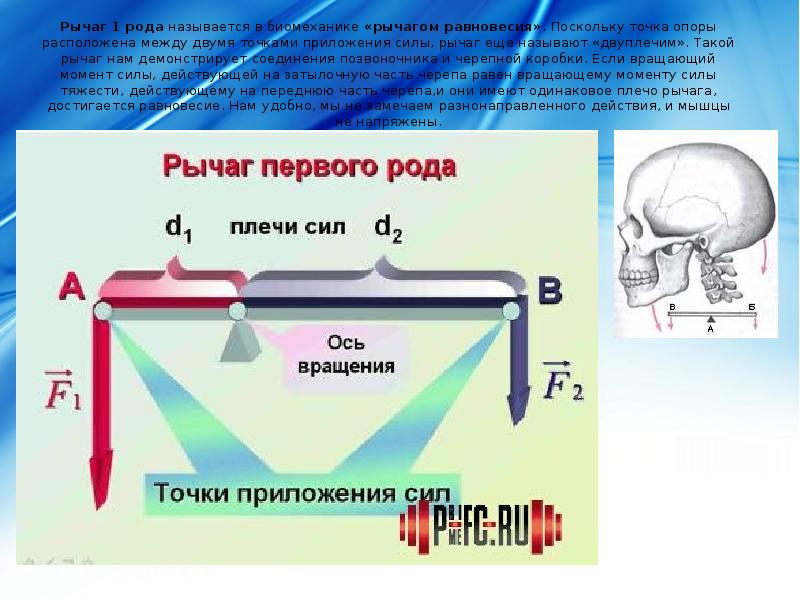
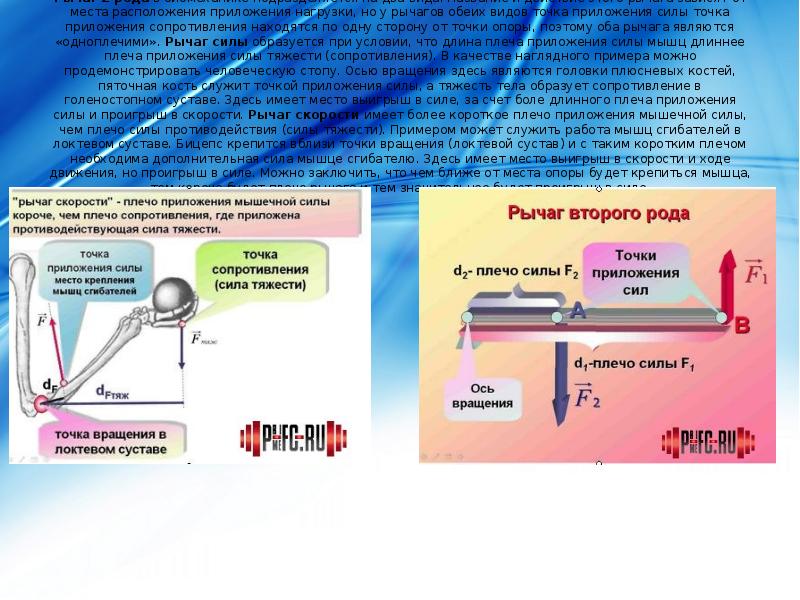
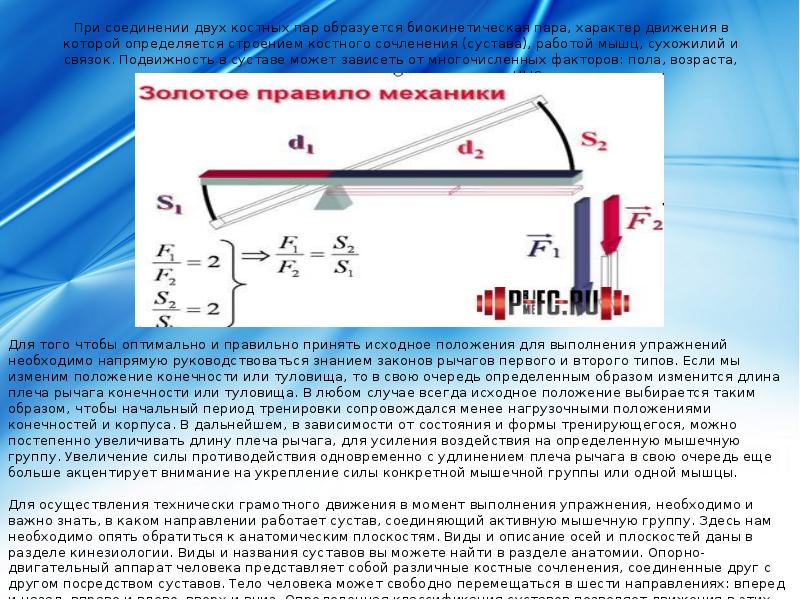
«Рычаги в организме человека» В скелете животных и человека все кости, имеющие некоторую свободу движения, являются рычагами. Например, у человека – кости конечностей, нижняя челюсть, череп, фаланги пальцев. Рычажные механизмы скелета обычно рассчитаны на выигрыш в скорости при потери в силе. Рассмотрим условия равновесия рычага на примере черепа (приложение №1). Здесь ось вращения рычага О проходит через сочленение черепа с первым позвонком. Спереди от точки опоры на относительно коротком плече действует сила тяжести головы , позади – сила тяги мышц и связок, прикрепленных к затылочной кости. Рука тоже представляет собой совершенный рычаг, точка опоры которого находится в локтевом суставе. Действующей силой является сила двуглавой мышцы (бицепс), которая прикрепляется к бугорку лучевой кости, преодолеваемым сопротивлением является груз , приложенный к кисти. Под действием силы рычаг – рука поднимает груз, находящийся на ладони. Чертёж показывает этот момент вращения мышечной силы (произведение силы на её плечо) равен в данном случае Момент вращения груза M будет равен .Если пренебречь массой лучевой кости, то в состоянии равновесия = Точка приложения силы находится на расстоянии =3 см (т.е. плечо силы =3 см), а плечо силы тяжести =30 см, отсюда следует Таким образом, чтобы удержать груз M, необходимо усилие мышцы, в десять раз превышающую величину груза (приложение №2). То, что проигрываем здесь в силе, не имеет особого значения, - мышца обладает достаточно большой силой. Зато очень важно то, что, проигрывая в силе, мы выигрываем в других отношениях. Небольшое сокращение длины мышцы позволяет в данном случае осуществить значительное перемещение ладони с грузом (мы можем поднять груз даже к плечу). Кроме того, мы выигрываем в скорости перемещения. Мышцы не могут очень быстро сокращаться; к счастью, при таком рычаге этого не требуется: скорость перемещения ладони с грузом оказывается в 10 раз больше скорости сокращения мышцы. Другими словами, проигрывая в 10 раз силе, мы во столько же раз выигрываем в длине и скорости перемещения груза. Другим примером работы рычага является действие свободы стопы при подъеме на полупальцы. Опорой О рычага, через которую проходит ось вращения, служат головки плюсневых костей. Преодолеваемая сила – вес всего тела – приложена к таранной кости. Действующая мышечная сила осуществляющая подъем тела, передаётся через ахиллово сухожилие и приложена к выступу пяточной кости (приложение №3). Почему вытянутой рукой нельзя удержать такой же груз, как согнутой? Когда рука вытянута, то направление действия мышечной силы составляет малый угол с продольной осью вращения рычага (приложение №4). Чтобы в этом случае удержать груз такой же, как и при согнутой руке, нужно значительно увеличить мышечное усилие. При одном и том же мышечном усилии вытянутой рукой можно удержать значительно меньший груз, чем согнутой. Учитель: Поражает исключительная целесообразность устройства нашей опоры – двигательной системы. Форма костей и суставов, как мы выяснили, обеспечивает человеку наиболее выгодные условия для движения. Ещё сложнее строение и взаимоотношение мышц – двигателей нашего тела.