Описание слайда:
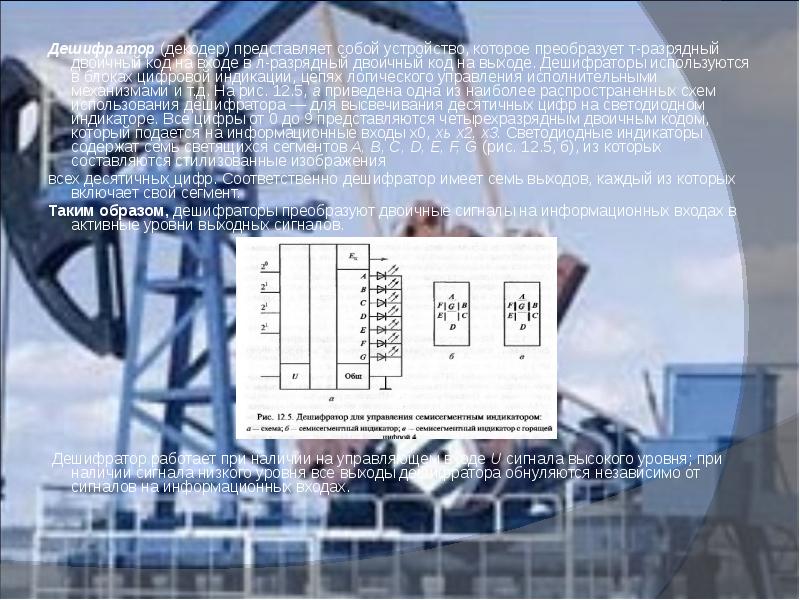
Дешифратор (декодер) представляет собой устройство, которое преобразует т-разрядный двоичный код на входе в л-разрядный двоичный код на выходе. Дешифраторы используются в блоках цифровой индикации, цепях логического управления исполнительными механизмами и т.д. На рис. 12.5, а приведена одна из наиболее распространенных схем использования дешифратора — для высвечивания десятичных цифр на светодиодном индикаторе. Все цифры от 0 до 9 представляются четырехразрядным двоичным кодом, который подается на информационные входы х0, хь х2, х3. Светодиодные индикаторы содержат семь светящихся сегментов А, В, С, D, Е, F, G (рис. 12.5, б), из которых составляются стилизованные изображения Дешифратор (декодер) представляет собой устройство, которое преобразует т-разрядный двоичный код на входе в л-разрядный двоичный код на выходе. Дешифраторы используются в блоках цифровой индикации, цепях логического управления исполнительными механизмами и т.д. На рис. 12.5, а приведена одна из наиболее распространенных схем использования дешифратора — для высвечивания десятичных цифр на светодиодном индикаторе. Все цифры от 0 до 9 представляются четырехразрядным двоичным кодом, который подается на информационные входы х0, хь х2, х3. Светодиодные индикаторы содержат семь светящихся сегментов А, В, С, D, Е, F, G (рис. 12.5, б), из которых составляются стилизованные изображения всех десятичных цифр. Соответственно дешифратор имеет семь выходов, каждый из которых включает свой сегмент. Таким образом, дешифраторы преобразуют двоичные сигналы на информационных входах в активные уровни выходных сигналов. Дешифратор работает при наличии на управляющем входе U сигнала высокого уровня; при наличии сигнала низкого уровня все выходы дешифратора обнуляются независимо от сигналов на информационных входах.